|

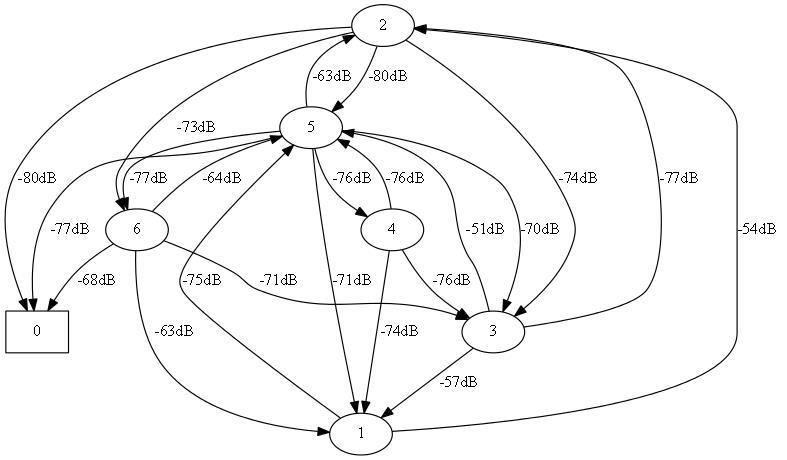
Rys.1. Graf przedstawiający wykryte połączenia w sieci. Grafy uzyskiwane są automatycznie.

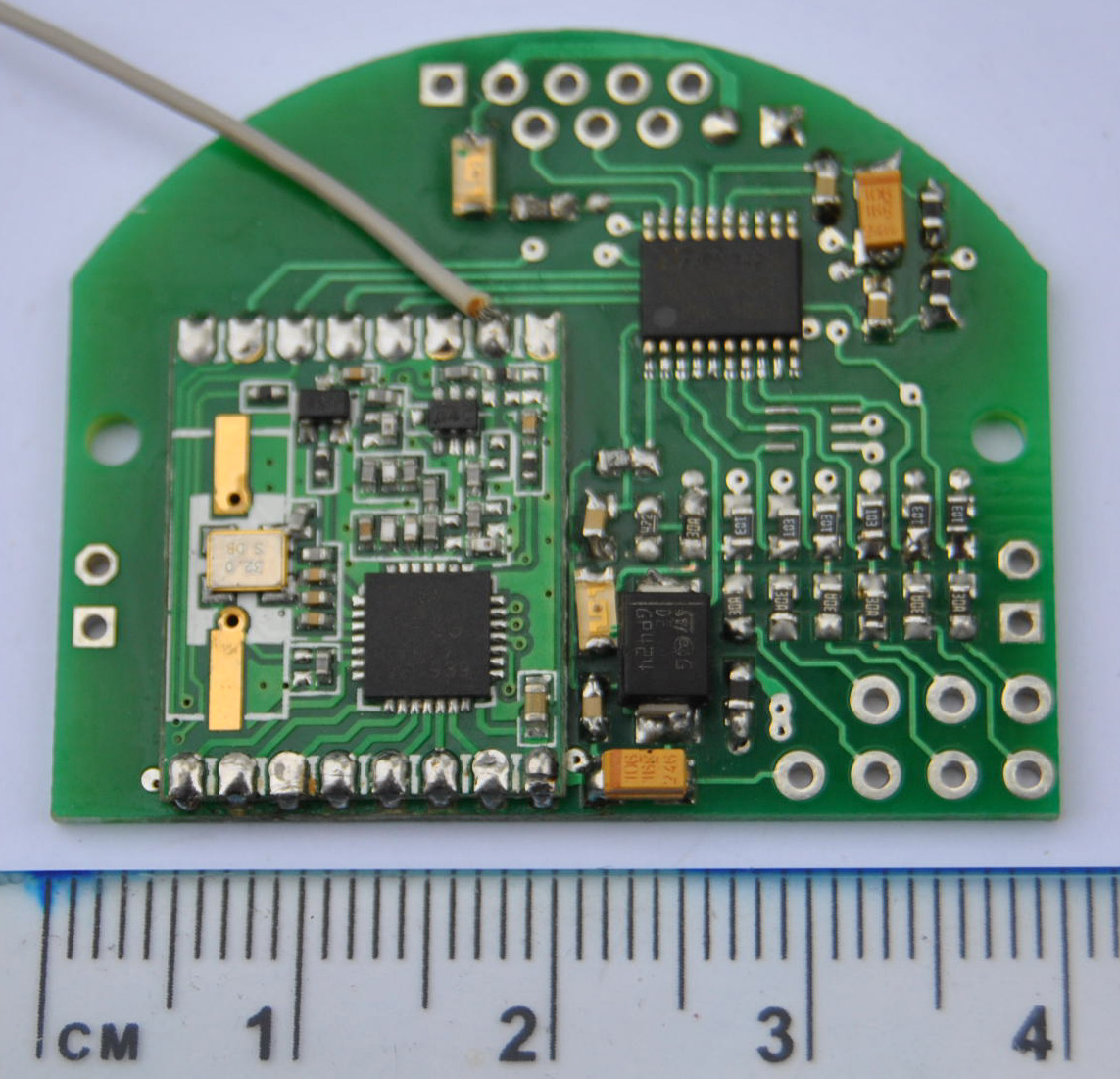
Rys.2. Zdjęcie realizacji praktycznej węzła sieci (prototyp).
|
Sieć bezprzewodowa do zastosowań w automatyce budynkowej
Budowa sieci
Zaprojektowana sieć składa się z urządzenia nadrzędnego (master) oraz wielu urządzeń wykonawczych (węzłów), przy czym każdy z węzłów może retransmitować odebraną ramkę danych (telegram). W danej sieci może znajdować się jeden master będący układem zarządzającym i bramą do układów zewnętrznych oraz wiele węzłów. Liczbę węzłów można dowolnie zmieniać.
Sieć została zaprojektowana w taki sposób, aby w jej gałęziach można było zastosować mikrokontrolery o jak najmniejszych zasobach. W trakcie pracy węzły nie muszą przechowywać informacji o istniejących połączeniach występujących w sieci co znacznie zmniejsza ilość pamięci potrzebnej na przechowywanie tablic zawierających informacje o połączeniach.
Zaprojektowane rozwiązanie umożliwia działania kilku sieci tego rodzaju w tym samym obszarze (np. dwie oddzielne sieci dla odczytu liczników energii elektrycznej i wodomierzy). Każda z sieci posiada swoją nazwę identyfikującą. Moduły przesyłając dane zawierają w nich informacje, do której z sieci te dane należą.
Konfiguracja sieci
Każdy z węzłów sieci identyfikowany jest poprzez jego unikalny 32-bitowy numer, będący odpowiednikiem numeru MAC kart sieciowych. Podczas pierwszego uruchomienia sieci urządzenie nadrzędne wykonuje operację pozwalającą na zebranie informacji o wszystkich połączeniach istniejących między węzłami sieci.
Zbieranie informacji o połączeniacrh między węzłami należącymi do danej sieci odbywa się sekwencyjnie. Na początku urządzenie nadrzędne rozsyła żądanie przedstawienia się wszystkich węzłów będących w jego zasięgu. Następnie do każdego z węzłów, który odpowiedział na żądanie identyfikacji przesyłany jest rozkaz, aby to on dokonał identyfikacji węzłów w swoim zasięgu. Zebrane dane przesyłane są do mastera. Powyższe operacje wykonywane są sekwencyjnie, tak aby wykonał je każdy ze znalezionych węzłów. Razem z informacjami o sieci połączeń zbierane są dane o sile sygnału (RSSI) między węzłami.
Na rysunku 1 przedstawiono graf powstały na skutek zebrania informacji o połączeniach w sieci. Ze względu na czytelność rysunku przedstawiono sieć zawierającą układ nadrzędny (oznaczony jako 0) i 6 węzłów (oznaczonych od 1 do 6). W praktyce liczba węzłów w danej sieci ograniczona jest ilością pamięci RAM mikrokontrolera znajdującego się w węźle. Mikrokontrolery posiadające 1kB RAM’u mogą pracować w sieciach zawierających do około 100 węzłów.
Dysponując danymi o połączeniach między węzłami algorytm zawarty w urządzeniu nadrzędnym ustala optymalne trasy przesyłania danych do węzłów. Optymalizacja trasy przesyłania danych może odbywać się w dwóch zasadniczych trybach: najmniejszej liczbie węzłów pośredniczących lub trasie o najsilniejszym sygnale RSSI. Trasy są wyznaczane za pomocą algorytmu Dijkstry.
Więcej informacji na temat tego projektu możecie Państwo znaleźć w artykule w czasopiśmie: PRZEGLĄD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 91 NR 9/2015 (http://pe.org.pl/issue.php?lang=0&num=09/2015)
|
|
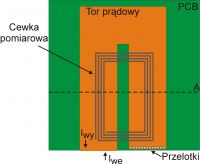
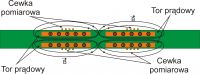
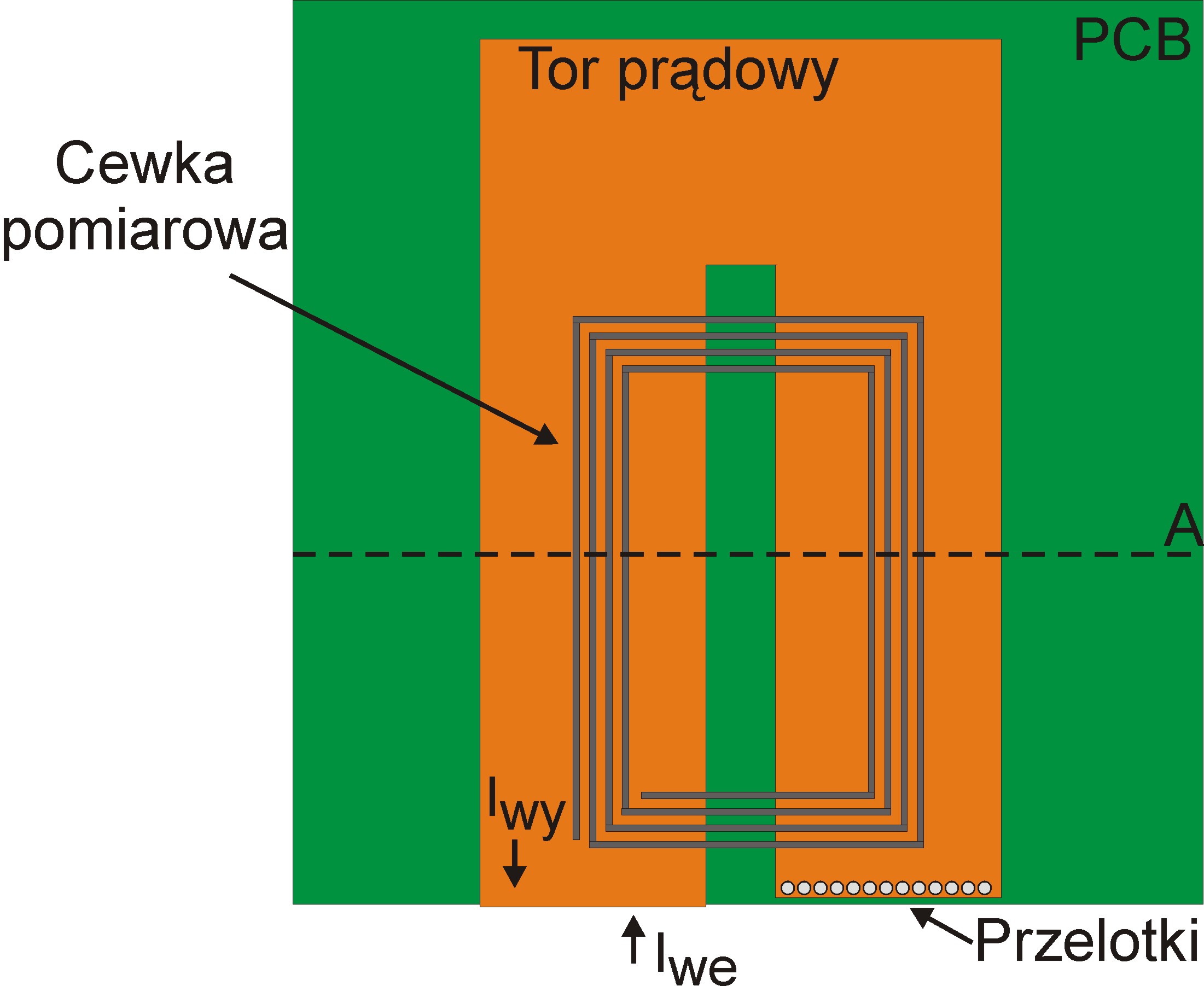
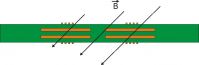
Rys. 1. Czujnik planarny: a). widok z góry, b). przekrój poprzeczny płytki czujnika wzdłuż linii A.
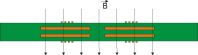
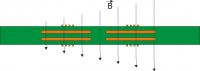
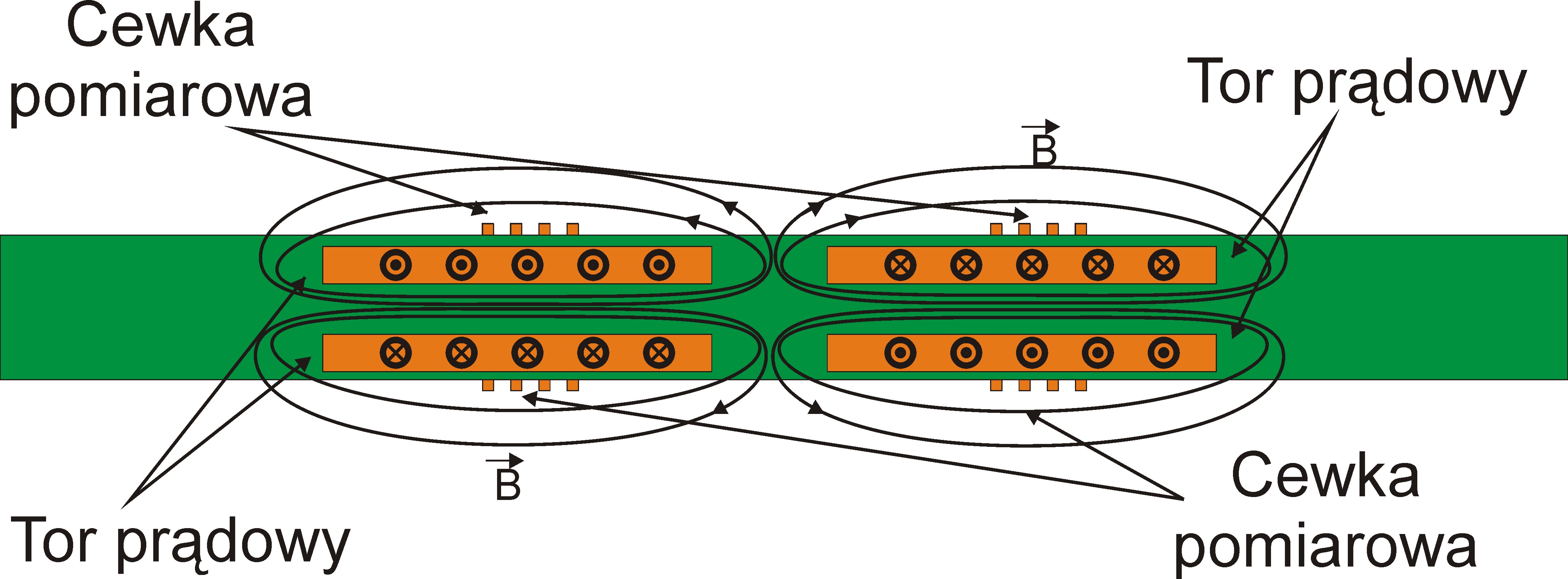
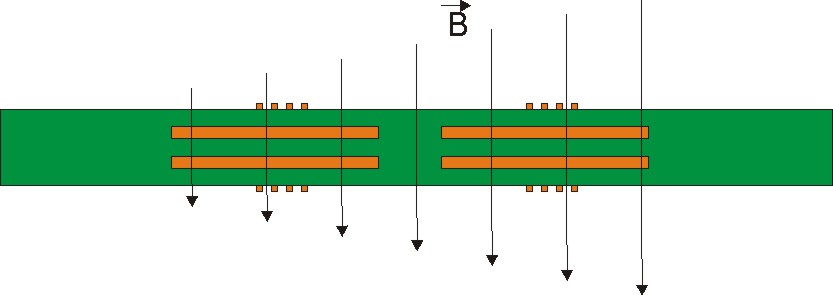
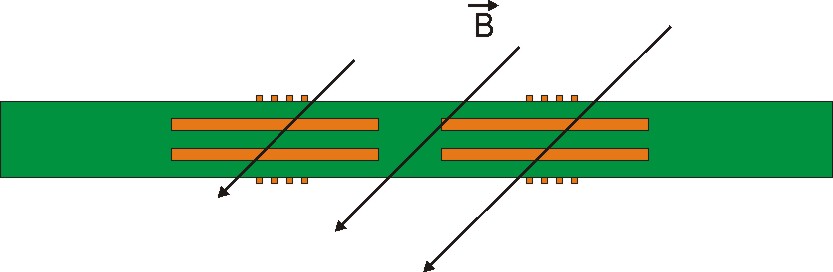
Rys.2. Kompensacja sygnału pochodzącego od zewnętrznego pola magnetycznego: a). jednorodne prostopadłe pole zakłócające, b). prostopadłe pole zakłócające posiadające gradient wzdłuż osi poziomej, c). pole zakłócające posiadające gradient wzdłuż osi poziomej i pionowej.
|
Indukcyjny czujnik prądu w technologii PCB
Wstęp
Obecnie na całym świecie, przestarzałe, liczące już około 100 lat konstrukcje indukcyjnych liczników energii elektrycznej są wymieniane na nowoczesne liczniki elektroniczne. Elementem metrologicznym statycznych liczników mającym największy wpływ na dokładność pomiaru są czujniki prądu. Podstawowe parametry metrologiczne jakie muszą spełniać czujniki stosowane w licznikach energii wynikają z normy PN-EN 50470. Dla licznika klasy dokładności C, o prądzie minimalnym 0,15 A i prądzie maksymalnym 100 A całkowity błąd licznika nie może przekroczyć 1% z czego wynika, że dla tego zakresu błąd czujnika nie może przekroczyć wartości 1%. Z normy wynika także prąd rozruchu o wartości 20 mA. Czujnik nie może ulec uszkodzeniu przy przepływie prądu 3 kA przez 10 ms. Zgodnie z normą dodatkowy błąd spowodowany wpływem zmiennego pola magnetycznego pochodzenia zewnętrznego o wartości 0,5 mT i częstotliwości sieci nie może przekroczyć 1%.
Ze względu na pojawienie się w ostatnich latach bardzo silnych magnesów neodymowych i liczne próby nielegalnego poboru energii przy użyciu tych magnesów, czujniki prądu muszą być dodatkowo odporne na zakłócenia wywołane silnymi stałymi polami magnetycznymi.
Obecnie najczęściej stosowanymi czujnikami do pomiaru prądu w licznikach energii elektrycznej są boczniki oraz przekładniki prądowe. Rzadziej stosuje się czujniki Halla oraz czujniki magnetorezystancyjne. W ostatnich latach wzrasta zainteresowanie cewkami Rogowskiego, które w szczególności znajdują zastosowanie w pomiarach dużych prądów.
Budowa czujnika
Prezentowany czujnik zbudowany jest w oparciu o czterowarstwową płytkę obwodu drukowanego (rys. 1 i 2). Wewnętrzne warstwy płytki zaprojektowano w taki sposób, aby tworzyły tor prądowy o odpowiedniej geometrii (rys. 1). Ścieżki znajdujące się na warstwach zewnętrznych płytki poprowadzono w taki sposób aby utworzyły one uzwojenie wtórne przetwornika. W uzwojeniu tym indukuje się napięcie proporcjonalne do pochodnej prądu płynącego w torze prądowym. Sposób poprowadzenia ścieżek uzwojenia wtórnego został opracowany w taki sposób, aby indukowało się w nim napięcie zależne od prądu mierzonego, a kompensowane były sygnały pochodzące od zakłócających strumieni magnetycznych. Poglądowa budowa czujnika przedstawiona została na rysunku 1. Tor prądowy znajduje się w dwóch wewnętrznych warstwach obwodu. Prąd mierzony doprowadzany jest do jednej z warstw, w której przepływa ścieżką obwodu ukształtowaną w kształt litery U, następnie za pomocą przelotek prąd przepływa do drugiej warstwy toru, która jest symetryczna do pierwszej i umieszczona równolegle do niej. Druga warstwa toru prądowego zakończona jest zaciskiem, przez który odprowadza się prąd wyjściowy. Rysunek 1b przedstawia przekrój czujnika wzdłuż linii A zaznaczonej na rysunku 1a. Geometria toru prądowego wymusza przepływ prądu w taki sposób, aby pole magnetyczne przezeń generowane miało rozkład przestrzenny, przedstawiony na rysunku 1b. W środkowej części czujnika wektory indukcji pola magnetycznego mają kierunek prostopadły do płaszczyzny płytki, przy czym zwrot wektorów po obu stronach płytki jest przeciwny. Uzwojenia wtórne (pomiarowe) znajdują się na zewnętrznych warstwach płytki i połączone są różnicowo tak, aby sygnały indukowane przez strumienie o przeciwnych zwrotach dodawały się, a sygnały pochodzące od strumieni o tym samym zwrocie przenikających obie cewki pomiarowe znosiły się. Ułożenie uzwojenia wtórnego oraz linie pola magnetycznego wytwarzane przez tor prądowy przedstawiono na rysunku 1.Wektor indukcji magnetycznej pochodzący z zewnętrznego źródła ma ten sam kierunek i zwrot dla obu cewek pomiarowych czujnika. W przypadku jednorodnego pola zakłócającego, napięcia indukowane w cewkach kompensują się, ponieważ przez obie cewki przepływa ten sam strumień magnetyczny. Sytuacja taka przedstawiona została na rysunku 2a. Podobnie jest dla przypadku przedstawionego na rysunku 2b gdzie pole zakłócające posiada gradient, ale zawiera tylko składową prostopadłą do powierzchni czujnika. W tej sytuacji strumień indukcji magnetycznej przenikający zarówno górną jak i dolną cewkę pomiarową ma tą samą wartość, przez co sygnał wyjściowy pochodzący od tego strumienia zostanie skompensowany.
Sygnał pochodzący od pól zewnętrznych, które posiadają gradient indukcji, a ich wektor indukcji nie jest prostopadły do powierzchni czujnika nie zostaną skompensowane całkowicie, ponieważ strumienie indukcji przenikające dolną i górną cewkę pomiarową będą się od siebie różniły. Stopień kompensacji zależy od kąta pomiędzy wektorem indukcji a powierzchnią płytki, oraz od gradientu indukcji pola, a także od odległości pomiędzy cewkami pomiarowymi. Sytuacja taka została przedstawiona na rysunku 2c.
Więcej informacji na temat tego projektu możecie Państwo znaleźć w artykule w czasopiśmie: PAK 2010 nr 09, s. 1016-1019 ( http://www.pak.info.pl/index.php?menu=artykulSzczegol&idArtykul=2212 ).
|